Skills Used: CAD (Siemens NX), Engineering Design, Rapid Prototyping, Arduino, Engineering Analysis
Personal Project (First Prototype) to aim and shoot a Nerf Gun (01/24-12/24)
Timeline: 1/2024 - 12/2024
Goal: Learn Design by doing
At the time of this project, I had little experience in design or prototyping, but really wanted to understand the process of designing a product. In order to do this, I decided to make this robot to shoot a DartZone Pro Mk-III. I thought that making something fun would be a good introduction to design. I started working on this project with a friend of mine but ended up owning the design myself.
The goal of this robot is to aim and shoot a DartZone MKIII Pro Nerf Gun at a human with a budget of under $1000.
Design Process
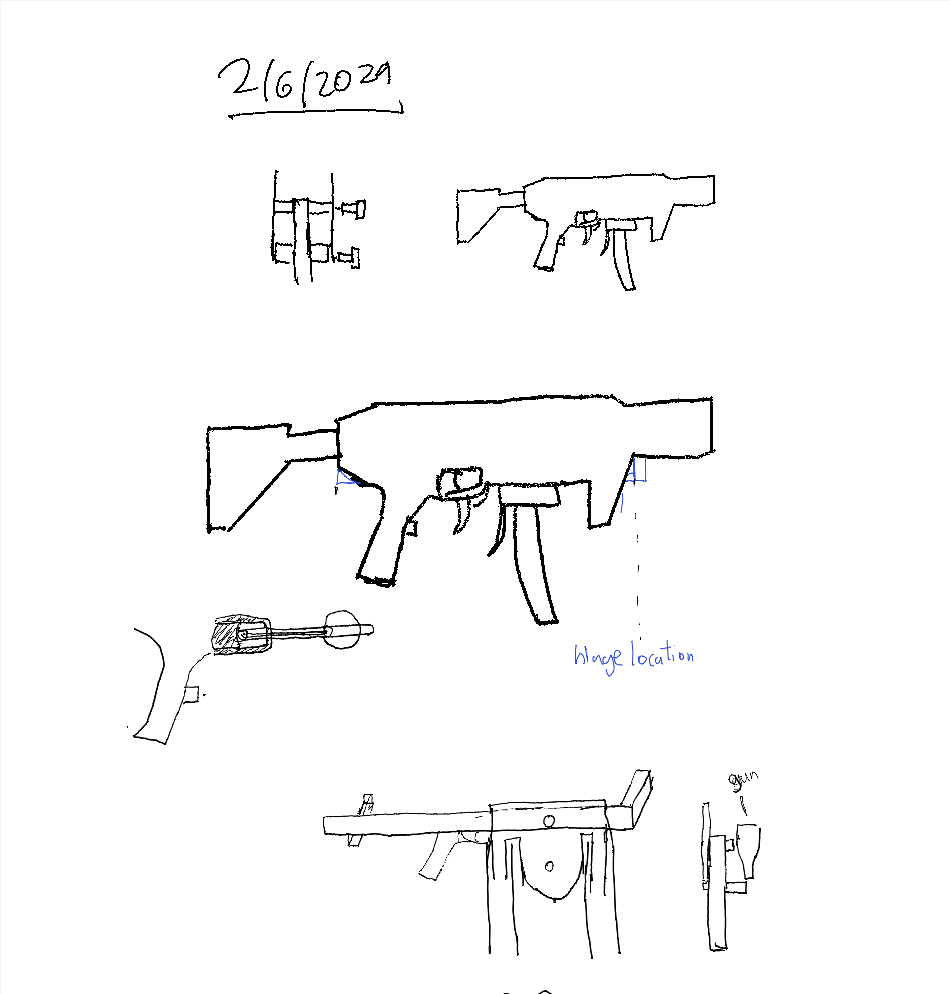
Concept Sketch
Set forward customer requirements and turned them into engineering specifications through engineering analysis
Brainstormed ideas to make initial concept
Made model of robot in CAD using engineering analysis to guide dimensions.
Manufactured robot using 3D-printing and aluminum machining
Tested various subsystems of robot
Motor Control
Trigger Assembly
Turntable
Gun mount
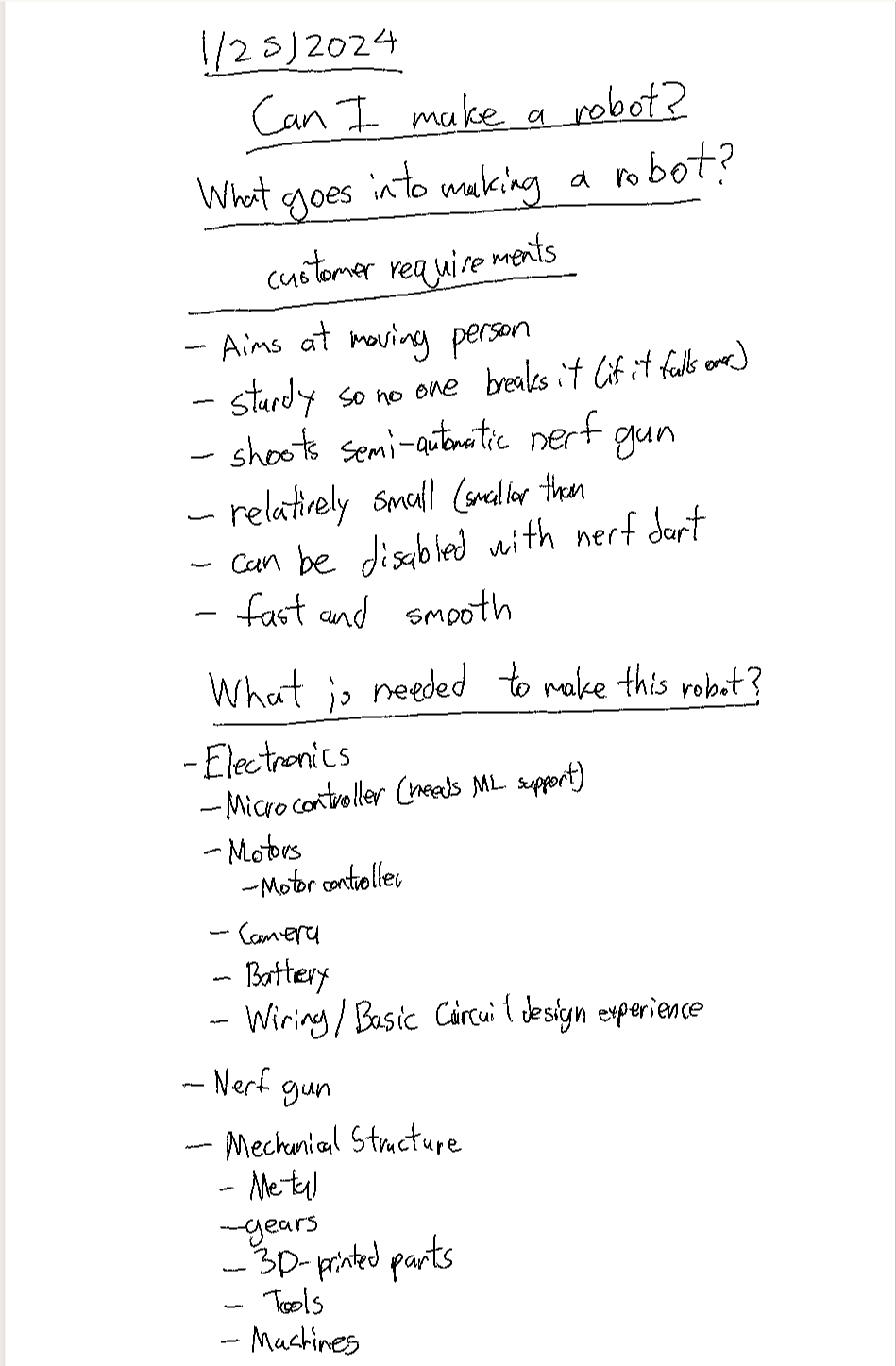
Some Customer Requirements
Prototype
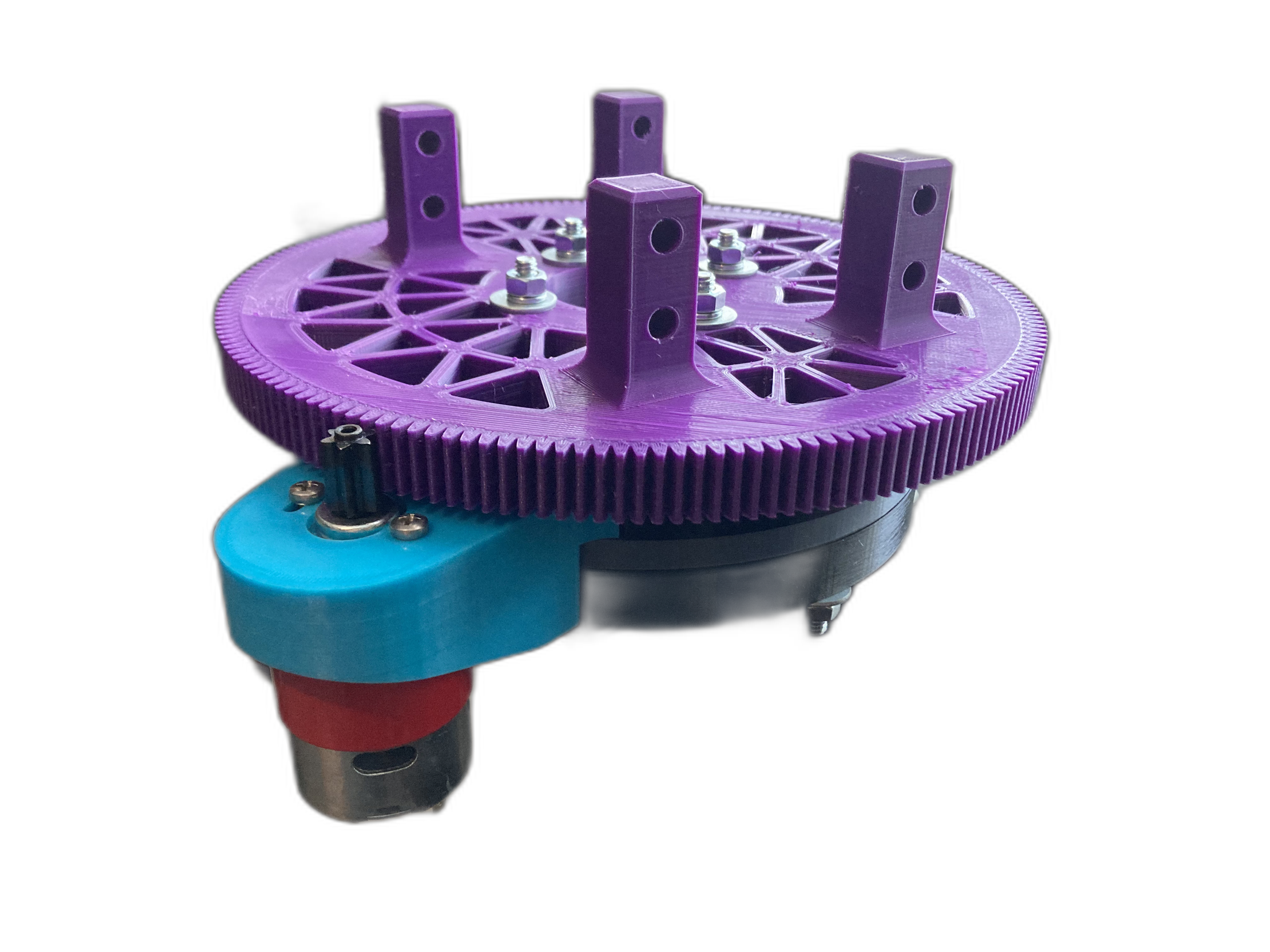
Turntable Prototype
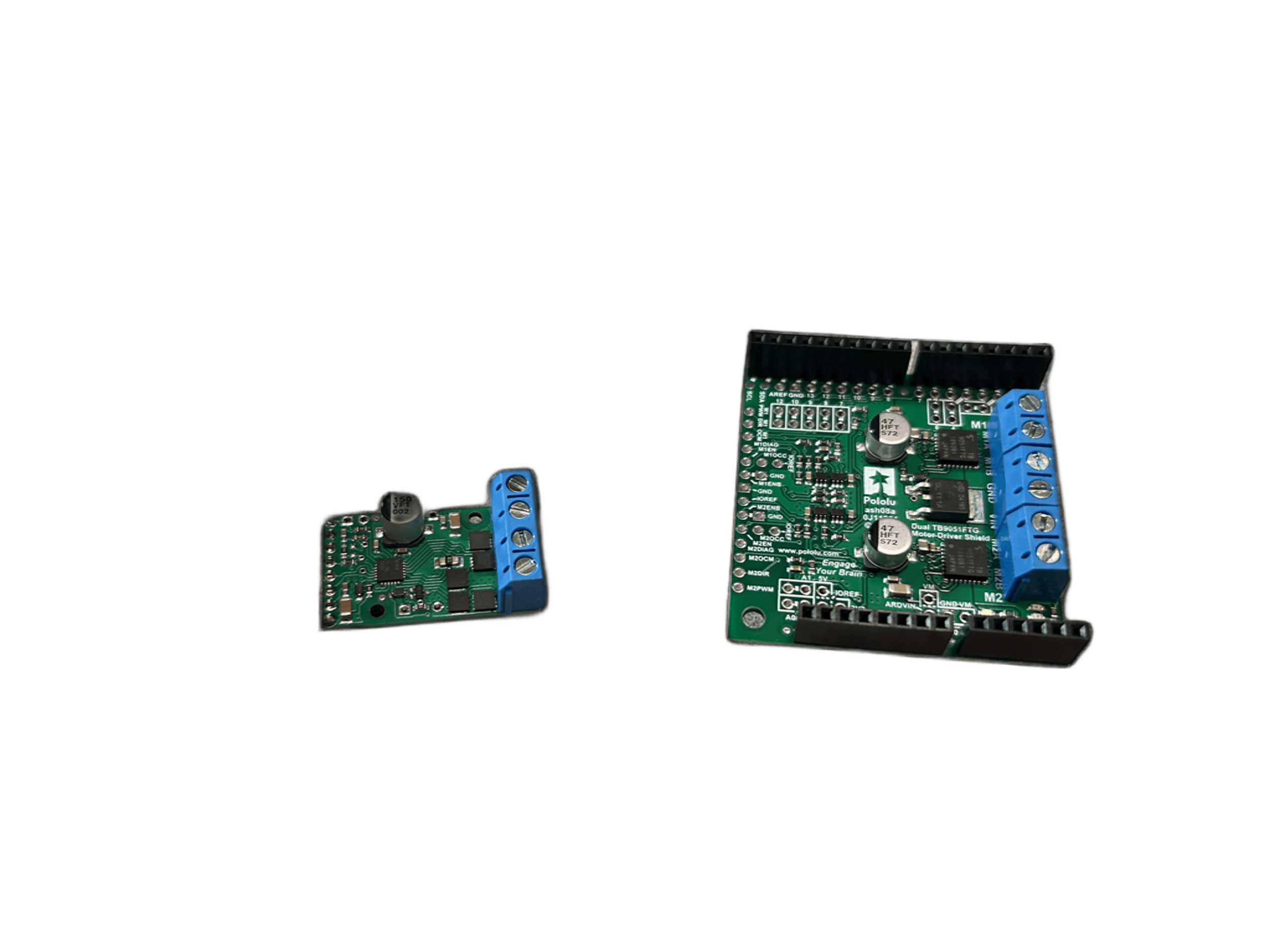
Pololu Motor Driver and Dual Motor Driver
Most of the first prototype turned out well. Here were some features:
3D-modeled assembly using Siemens NX
Gun mount using slot to connect to nerf gun accessory rail
Trigger-Actuating Assembly using slider-crank linkage
Turntable with 3D-printed Bearing (low-load)
Electronics and Computer Vision
Two different DC motor driver boards connected to Arduino Uno and 12V Lead-Acid Battery
One for turntable (higher power)
One for trigger and lifting motor
Tested YOLO Person Recognition v8 model on computer with OpenCV
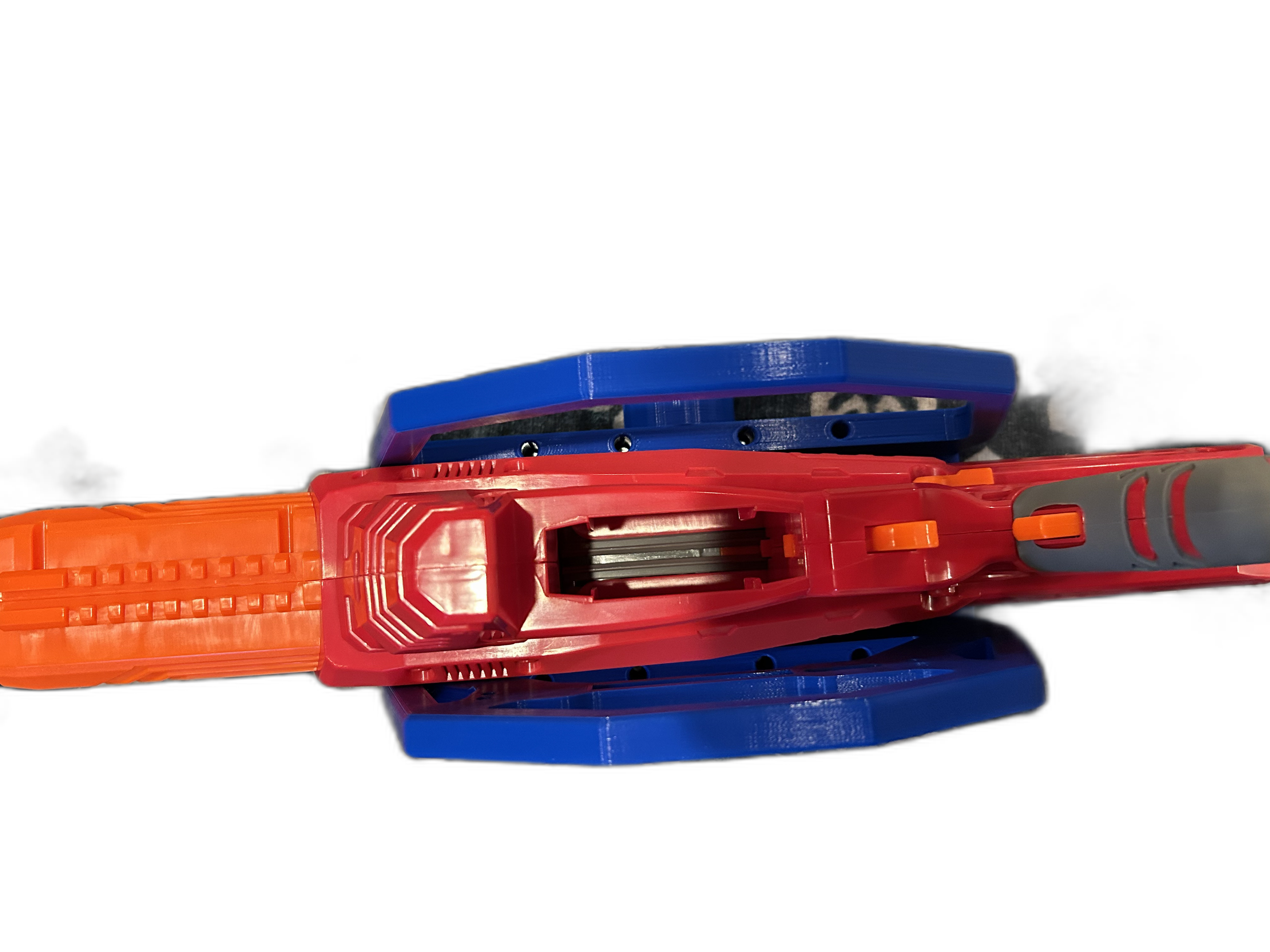
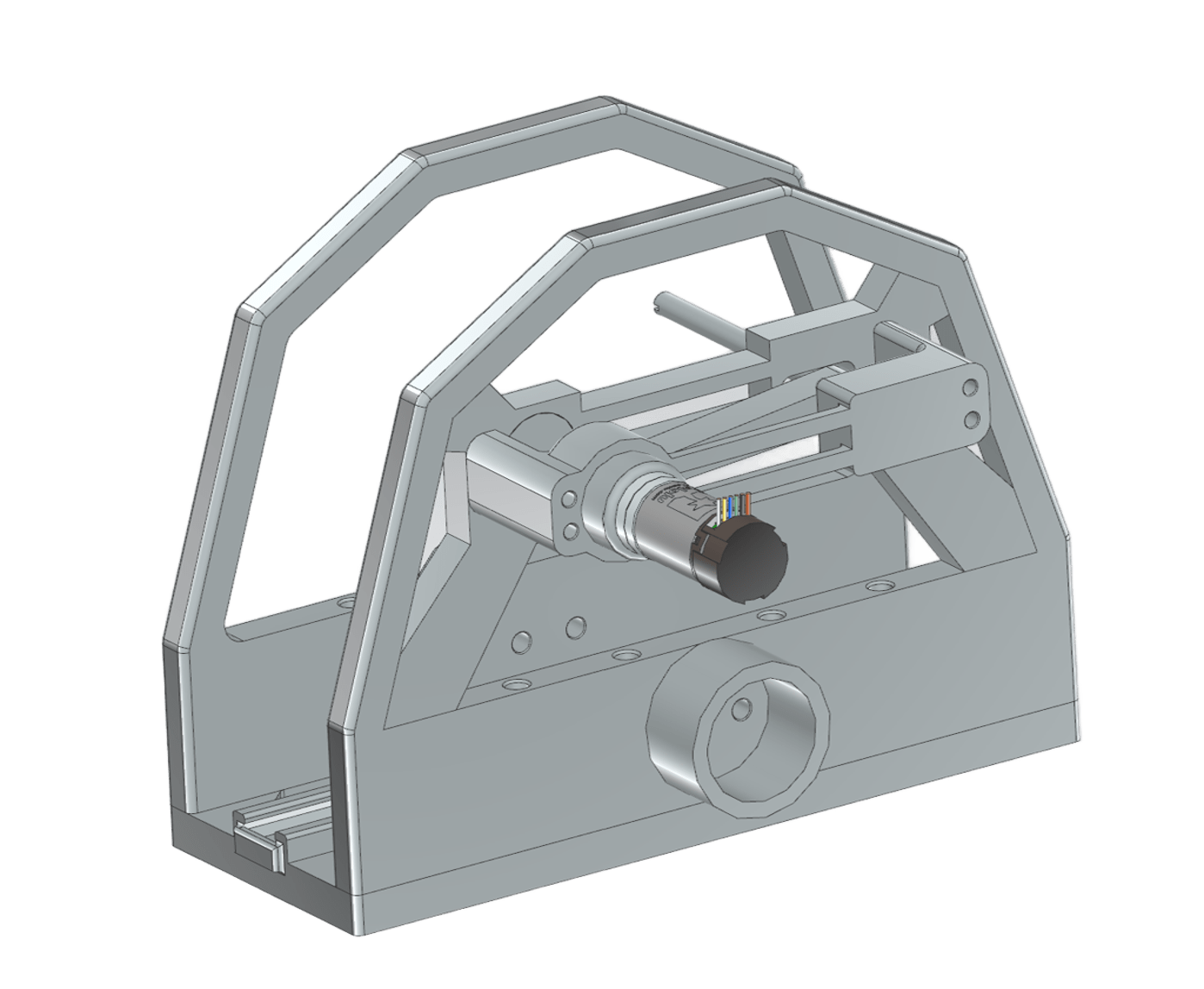
Nerf Gun in Gun Mount
Nerf Gun Mount with Trigger Mechanism CAD
Test Results/Next Steps
Test Results
-
Issue: Nerf gun jams easily
Fix: Use different nerf gun (which requires redesign)
-
Result: Rotation worked well, even under load
Issue: Contact between motor pinion and outer ring gear caused loud whining
Fix: Lubricate gear race or make gears same material
Issue: Aluminum stock connecting turntable and Gun Mount had significant flex.
Fix: Add 3D-printed bracing on top
-
Result: Nerf Gun rail fit in slot very well
Issue: Rail is sometimes too hard to get into
Fix: Make rail length smaller
-
Result: Printed several iterations of slider-crank linkage
Result: Tested motion and fit
Issue: Stroke length was too small
Fix: Make stroke length longer
-
Result: Soldered header pins onto board and tested DC motor control with Arduino IDE
Issue: Motor Driver boards not running
Fix: Debug code
Result: Tested OpenCV person tracking with YOLO
Issue: Person bounding box makes it hard to find center of body
Fix: Use body position tracking or face tracking model instead
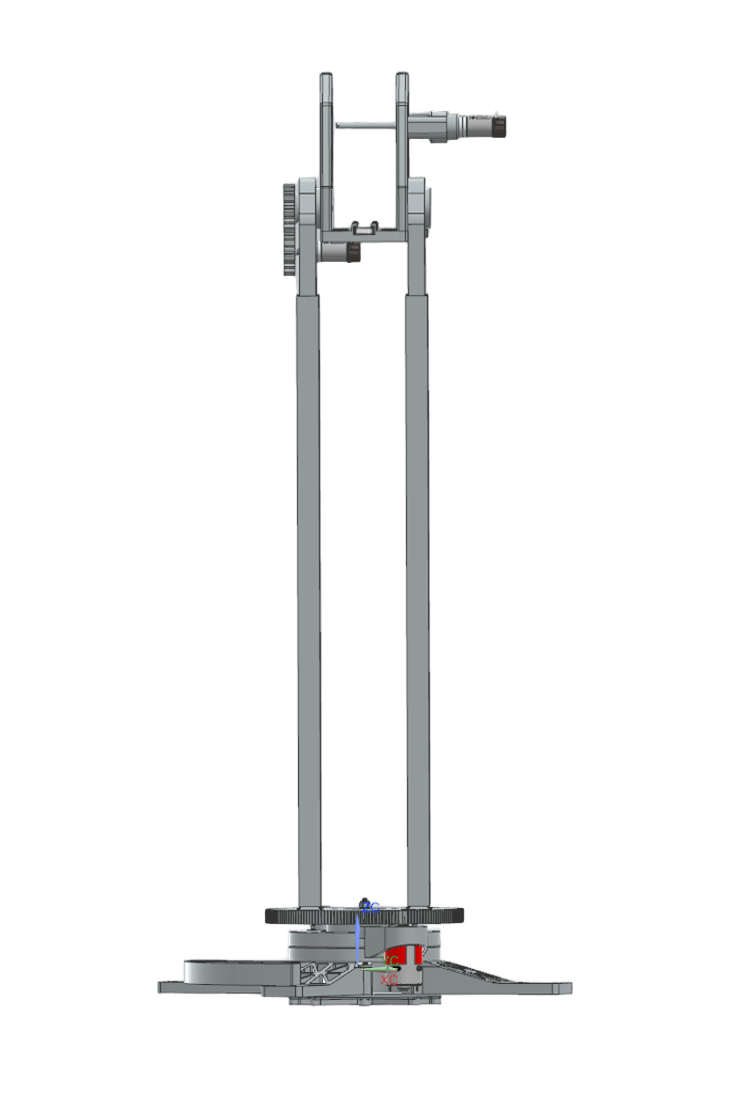
Nerf Gun Robot Side View CAD
The Next Steps for this project are to completely redesign the robot using knowledge gained from the test results to reduce design flaws.