Class Project (ME 444) to Design BD-1 Toy in 6 Weeks
Timeline: 11/2025 - 12/2025
Skills Used: CAD (Creo Parametric), Engineering Design, Rapid Prototyping, ESP32s motor control, ESP32s Sensor Interfacing, Engineering Analysis, Soldering, Protoboard Circuit Design
Goal: Build Marketable Toy from Scratch

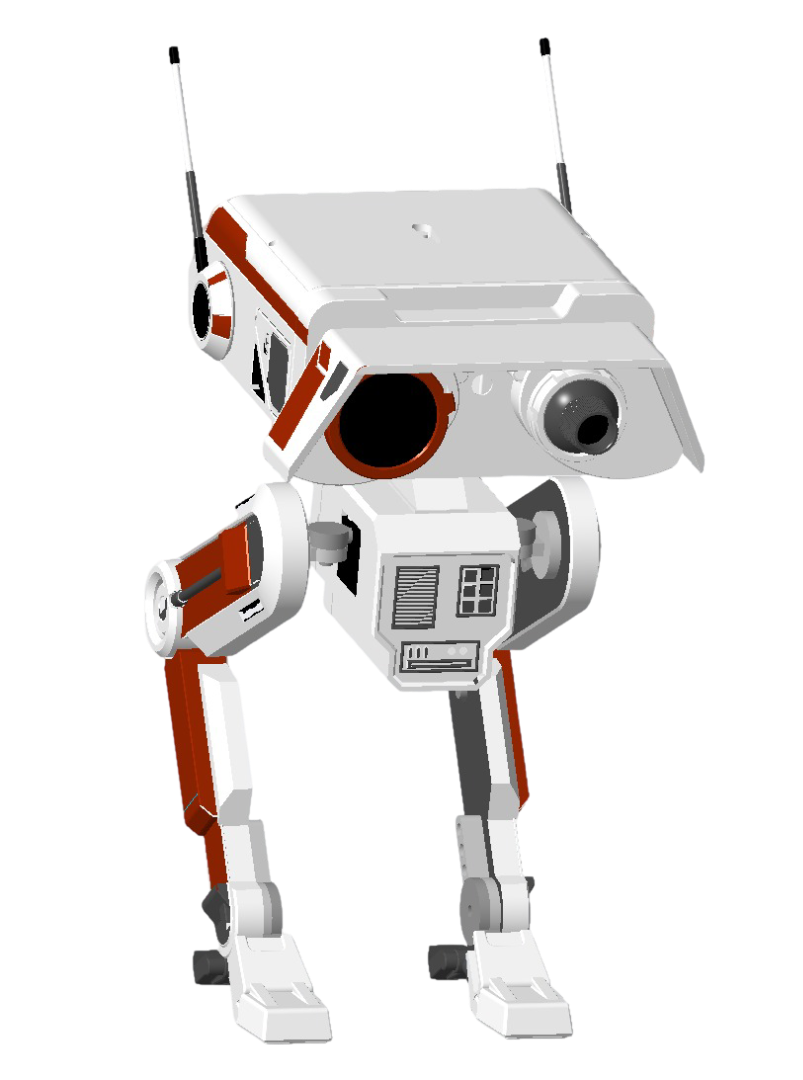
BD-1 (Credit to GameRadar.com)
The goal of this project was to build and sell a toy to a worldwide audience with a 4-person team. When brainstorming ideas for our final design, we settled on making a spin-off of BD-1, a droid from the Star Wars video game Star Wars Fallen Order. We decided to choose BD-1 due to its cuteness and feasibility of construction over 6 weeks.
Our goal was to replicate key features of BD-1 to make him come to life in toy form, using rapid prototyping methods and electronics. Then, at the end of the semester, we demonstrated our fully working toy at the ME 444 Toy Design Fair. Since we were team 22, we decided to name our product BD-22.
Design Process
Conducted Market Analysis on existing BD-1 toys
Planned 6-week design timeline leading up to Toy Fair
Built medium-fidelity prototype of subsystems
Redesigned subsystem based on prototype performance
Integrated subsystems to test overall performance
Painted and fine-tuned before Toy Fair
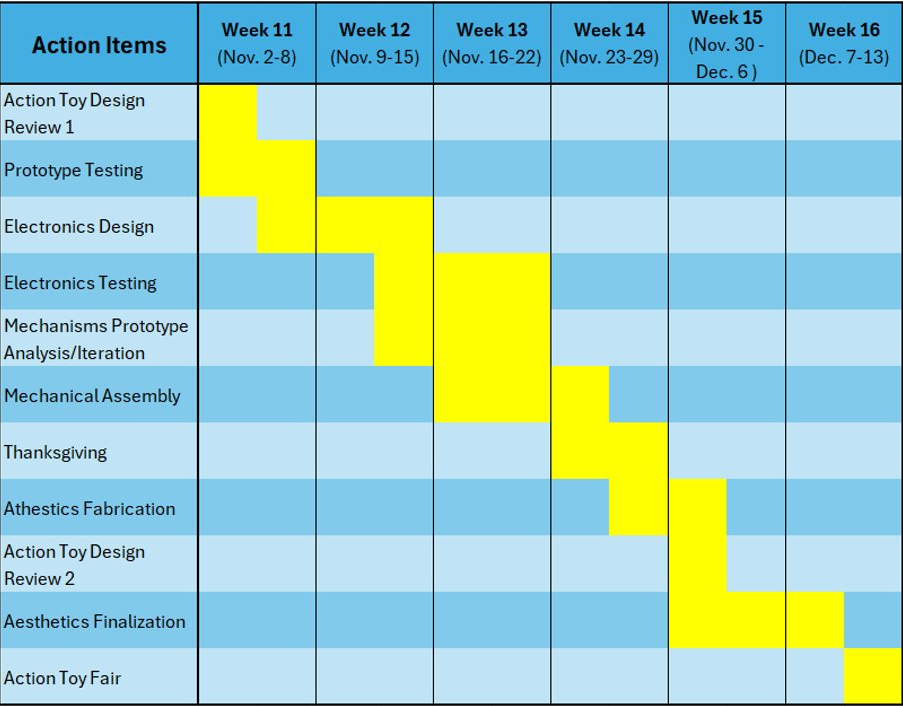
BD-22 Initial Design Timeline
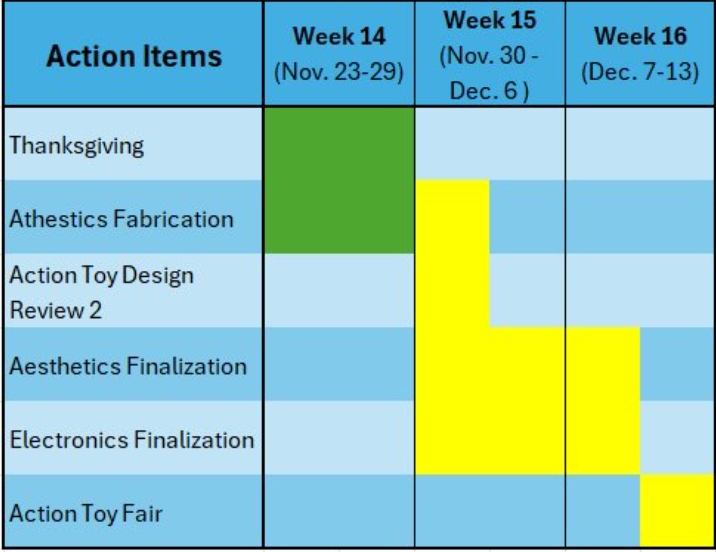
BD-22 Midterm Design Timeline
Subsystem Prototypes
Below are prototypes of four of our five subsystems:
Head motion gimbal
Antenna bevel gears
Leg joints
Face tracking/electronics
Shoulder mounting (not finished by deadline because of strap shipping delay)
I made a leg over-center mechanism prototype, a face tracking algorithm prototype, and electronics prototype. The team decided that the Lego prototype’s multiple pose options would make it easier to compensate for design error in the three weeks before the Toy Fair, so my over-center design mechanism was not chosen for the final design.

Electronic Circuit Prototype

Leg Over-Center Prototype
Leg Lego CAD

Head Gimbal Prototype
Results
The face tracking worked well enough for tracking faces side-to-side, with some oscillation. A modified P controller was used to track faces while a face-detection model was trained to recognized one face and a low confidence level was used to detect multiple faces.
The antenna bevel gear mechanism worked almost perfectly. They were programmed to perform a set asynchronous routine when a face was detected
Face Tracking and Antenna Movement
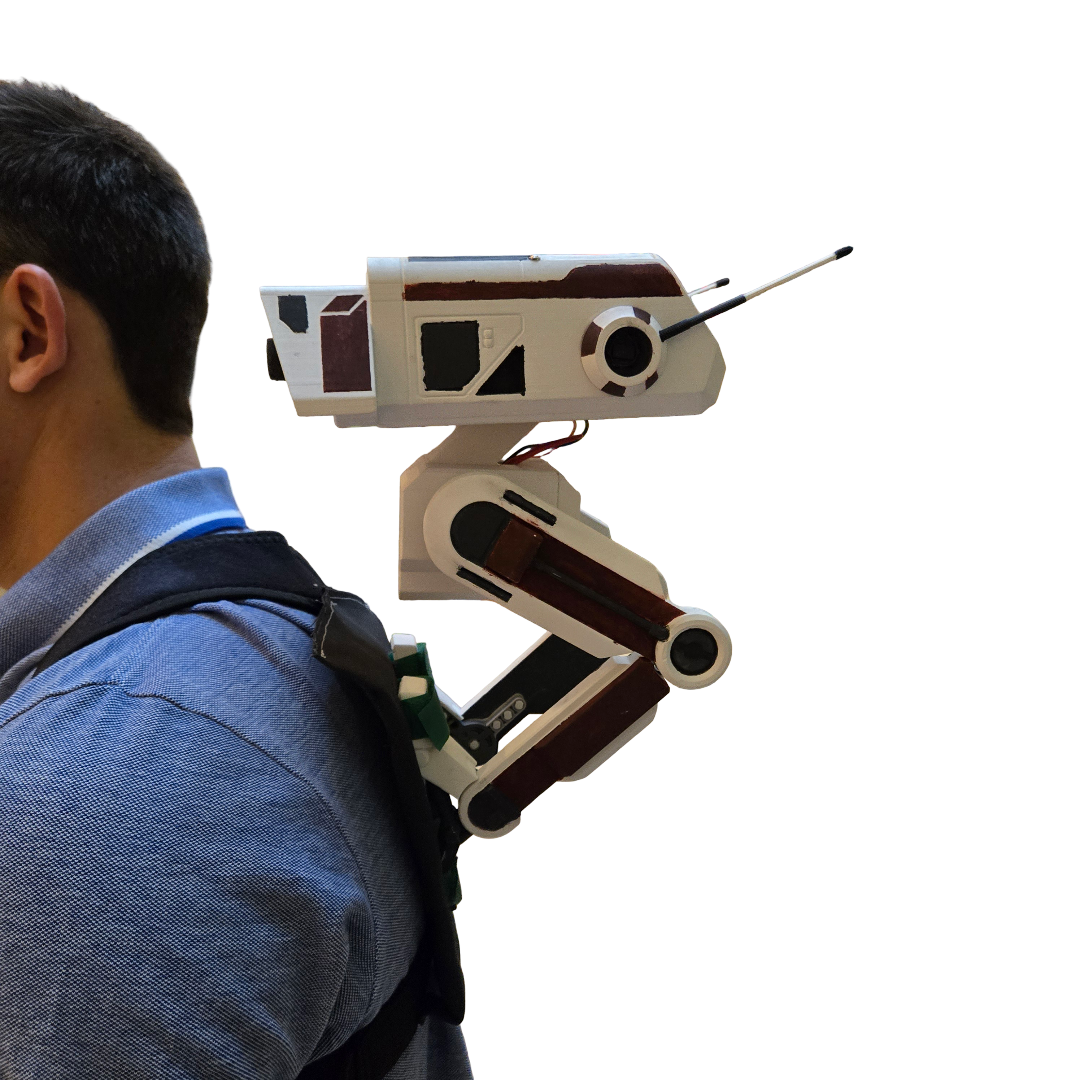
The shoulder mounting strap and mechanism supported BD-22 in the configuration shown in the photo.
The only downside to this design was the time it took to put BD-22 on the user’s back—securing him using the velcro straps took two people around 45 seconds.
The legs move successfully back and forth between the standing and shoulder mount pose. However, the posability makes it the robot somewhat unstable over time and care has to be taken to get the robot into the right position for standing.
Shoulder Mounting
The head gimbal worked tilting the head up and down and turning side to side with a test weight. However, tilting did not work with all components installed in the head, likely due to unexpected friction.
The servo and camera board were wired to the ESP32s microcontroller on protoboard for a lasting connection. The battery was housed in a compartment in the middle body segment.

Electronics in Head
Competition Results: Best Innovation and People’s Choice
Innovation Award and People’s Choice Award Certificate

BD-22 in Purdue ME Building Display Case
Next Steps
Some next steps I would recommend are:
Upgrading head turning and tilting servos to DC motors with higher torque and with encoders/potentiometers for more robust face tracking
Redesigning legs without lego joints for higher stability (perhaps utilizing springs or compliant mechanisms)
Redesigning head with electronics accessibility in mind and user ergonomics in mind
Performing design for assembly analysis for injection molded parts
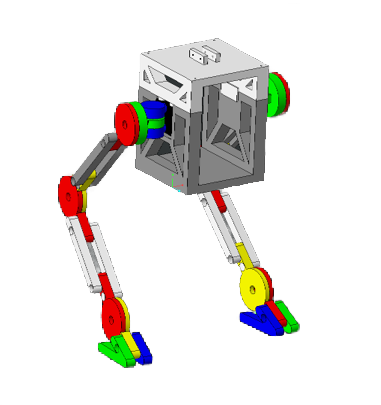
BD-22 CAD Screenshot